Основные понятия и определения

 К и н е м а т и ч е с к и й а н а л и з – это исследование расчётной схемы сооружения (системы), выполняемое до начала расчёта с целью определения кинематического качества системы (геометрической неизменяемости, мгновенной изменяемости или геометрической изменяемости), а в случае геометрической неизменяемости системы – также для выявления её статической определимости или неопределимости.
К и н е м а т и ч е с к и й а н а л и з – это исследование расчётной схемы сооружения (системы), выполняемое до начала расчёта с целью определения кинематического качества системы (геометрической неизменяемости, мгновенной изменяемости или геометрической изменяемости), а в случае геометрической неизменяемости системы – также для выявления её статической определимости или неопределимости.











Начинать расчёт сооружения имеет смысл лишь тогда, когда установлено, что он вообще может быть выполнен методами строительной механики, и определено, какие методы при этом следует использовать. В противном случае попытки составить и решить соответствующие уравнения могут оказаться безуспешными из-за возникновения нехарактерных для решаемой задачи математических проблем (недостаточность уравнений, их вырождение и др.). Поэтому необходима предшествующая расчёту оценка расчётной схемы рассматриваемой системы, называемая кинематическим анализом сооружения (системы).
Кинематический анализ позволяет своевременно обнаружить системы, расчёт которых либо вообще невозможен методами механики деформируемых тел – геометрически изменяемые системы (ГИС), либо может выполняться с использованием особых подходов – системы мгновенно изменяемые (МИС). Кроме того, в результате кинематического анализа выясняется, как именно предстоит рассчитывать систему – достаточно ли для определения усилий в системе одних только уравнений статики (в случае статически определимой системы) или необходимо рассматривать все три стороны задачи расчёта деформируемой системы – статическую, геометрическую и физическую (если система статически неопределимая).
Принципиальная схема кинематического анализа приведена на рис.1.6. Методика и техника выполнения проверок, обозначенных на блок-схеме операторами 1, 2 и 3, будут рассмотрены далее. Формально процедуры, описанные в правой части схемы, могут и не выполняться, если не ставить задачу добиться всё-таки возможности выполнить расчёт сооружения – либо путем трансформации расчётной схемы, либо – для мгновенно изменяемой системы – выбором специальных методов расчёта.
Рис.1.6
Строительная механика рассматривает геометрически неизменяемые системы (сооружения), то есть такие, перемещения точек которых возможны только в результате деформации системы.
Наипростейшей неизменяемой системой является шарнирный треугольник (рис.1.7).
Рис.1.7
Шарнирно-стержневой прямоугольник АВСД, показанный на рис.1.8, является геометрически изменяемой системой, так как приходит в движение без изменения длины и искривления стержней даже при бесконечно малых нагрузках.
Рис.1.8
Кроме уже известных понятий «геометрическая неизменяемость» (и соответственно геометрически неизменяемая система – ГНС), «геометрическая изменяемость» (геометрически изменяемая система – ГИС), «мгновенная изменяемость» (мгновенно изменяемая система – МИС), базовыми понятиями кинематического анализа являются диск, связь и степень свободы.
Д и с к – часть системы (один или несколько соединённых друг с другом элементов), форма и размеры которой могут изменяться только вследствие деформации материала.
Иными словами, если использовать гипотезу отвердения материала (считать материал недеформируемым), то признаком диска будет неизменность формы и размеров.
Рис. 1.9
Примеры дисков приведены на рис. 1.9:
– а, б, в, г, д – диски из одного элемента (а, б, в – стержни с прямолинейной, криволинейной и ломанной в плоскости или в пространстве осью; г – диск-пластинка; д – диск-оболочка);
– е, ж, з, и, к – диски из нескольких элементов (е, ж, з – из однотипных элементов – стержней, плоские (е, ж) и пространственный (з); и, к – комбинированные пластинчато- и оболочечно-стержневые, пространственные).
Незакреплённый диск может перемещаться в плоскости или пространстве, при этом координаты его точек в общей (глобальной) системе координат xyz изменяются (рис. 1.10), но в собственных (локальных) координатных осях xD yD zD , связанных с самим диском, положение его точек остается неизменным, если считать элементы диска недеформируемыми, – это означает, что диск перемещается как жёсткое целое.
Рис. 1.10
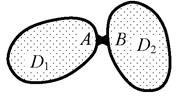
Диск может быть образован соединением нескольких ранее выявленных дисков, имеющих любую (возможно, достаточно сложную) внутреннюю структуру. Пример – на рис. 1.11, где в состав плоского диска I (DI) входят многостержневые «суб»-диски 1, 2 и 3 (D1 , D2 иD3), объединённые в шарнирный треугольник аналогично примерам на рис. 1.9, е, ж. Неизменяемость формы шарнирного треугольника очевидна; в дальнейшем будет дано доказательство этого.
Рис.1.11
Поскольку возможно последовательное «укрупнение» дисков, то ясно, что в ряде случаев (но не всегда!) вся система может рассматриваться, в конечном счете, как диск.
Особым диском, который используется в кинематическом анализе, является диск «земля», представляющий собой единую модель всех реальных объектов, играющих роль основания для рассчитываемого сооружения, – фундаментов, других конструкций, поддерживающих рассматриваемую систему.
Диск «земля» всегда считается неподвижным и недеформируемым (возможная деформативность реального основания изначально закладывается в расчётную схему сооружения путем введения податливых опор).
Для обеспечения геометрической неизменяемости сооружения его элементы и более крупные фрагменты (по терминологии кинематического анализа – диски) должны быть соединены (связаны) друг с другом и хотя бы некоторые из них – обязательно с «землей». Соответствующие соединительные устройства принято называть связями. Более общее определение связей объединяет их механико-математическое и прикладное (инженерное) истолкования:
с в я з и (механические) – ограничения на перемещения (линейные и/или угловые) точек или сечений элементов системы, а также устройства, технически реализующие эти ограничения.
З а м е ч а н и е : здесь термин «сечение элемента» не означает разделения элемента на части, а используется в том же смысле,
как в общепринятых выражениях «гипотеза плоских сечений», «угол поворота сечения», т.е. как указание на геометрический объект, для которого определяются или описываются кинематические свойства или параметры, в частности, перемещения.
Ограничения (одно или одновременно несколько) перемещений точки или сечения возникают в том случае, когда эта точка (сечение) некоторым способом соединяется с другими точками (сечениями элементов) одного и того же или разных дисков, в том числе диска «земля».
Абстрагируясь от конструктивных особенностей соединительных устройств, будем рассматривать их расчётные модели, применяя к ним в дальнейшем термин «связи».
Классификация связей
Связи различаются по следующим основным признакам:
1) по области расположения –
а) континуальные – распределённые по объему, поверхности или линии;
б) дискретные – в отдельных точках или сечениях;
Примерами распределённых связей могут служить деформируемое основание – для лежащих на нем балок, пластин, оболочек, вода – для подводных или плавучих сооружений, воздух – при колебаниях высотных объектов; в дальнейшем ограничимся рассмотрением только дискретных связей;
2) по соединяемым дискам связи подразделяются на
а) внутренние – соединяющие диски системы друг с другом;
б) внешние (опорные) – прикрепляющие диски системы к диску «земля»;
3) по числу ограничиваемых перемещений выделяют связи
а) простые (признак – связь накладывает ограничение на одно перемещение);
б) сложные (ограничивается более одного перемещения);
Простые связи различают по типу того одного перемещения, на которое связь накладывает ограничение – линейные и угловые;
4) по физическим свойствам связи бывают
а) жёсткие (недеформируемые);
б) податливые (деформируемые).
Особое значение имеет классификация связей по кинематическому признаку – она будет дана отдельно.
Типы связей плоских систем
Подробно рассмотрим основные типы дискретных связей плоских систем, не делая различия между связями внешними и внутренними, поскольку для самих связей безразлично, какие диски ими соединяются (при этом диск «земля» принципиально ничем не отличается от прочих дисков системы).
Типы связей устанавливаются по 3-му признаку приведенной выше классификации:
– связи 1-го типа – простые (одно ограничение на перемещения в месте наложения связи) –
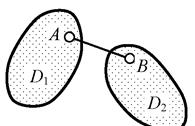
а) линейная связь (рис. 1.12) – жёсткий прямолинейный стержень АВ с шарнирами по концам, устраняющий возможность относительного (взаимного) линейного перемещения точки А диска D1 и точки В диска D2 по направлению оси связи (линии АВ);
Рис.1.12
б) угловая связь (рис. 1.13, а) в виде недеформируемого стержня А'CВ', объединённого с двумя идеальными (без трения) «ползунами», жёстко прикреплёнными соответственно к дискам D1 и D2 в точках А и В и не препятствующими линейным пере мещениям точек А и В вдоль осей ползунов (а значит, и полному взаимному линейному перемещению точек А и В), но не допускающими относительного (взаимного) поворота узлов или сечений дисков-стержней в точках А и В (если деформации дисков не учитываются, то невозможен взаимный поворот дисков в целом); на рис. 6, б показано упрощённое изображение внешней угловой связи (когда диском 2 является «земля»);
Рис.1.13
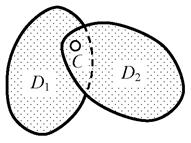
– связи 2-го типа – шарниры (два ограничения на перемещения в месте наложения связи) –
а) идеальный (без трения) цилиндрический шарнир (рис. 1.14) с осью вращения, проходящей через точку С перпендикулярно плоскости, в которой расположены диски D1 и D2; цилиндрический шарнир допускает относительный (взаимный) поворот дисков D1 и D2вокруг их мгновенного взаимного центра вращения – точки С, но устраняет возможность любых (т.е. одновременно, например, вертикального и горизонтального) относительных линейных перемещений точек дисков D1 и D2, через которые проходит ось шарнира;
Рис.1.14
б) идеальный (без трения) поступательный шарнир (рис. 1.15) – устройство, состоящее из недеформируемого штока АВ', жёстко прикреплённого к диску D1 , и направляющей (втулки), закреплённой в точке В диска D2 ; поступательный шарнир позволяет точкам А и В, принадлежащим соответственно дискам D1 и D2 , совершать свободное линейное относительное перемещение вдоль оси шарнира (линии АВ), но не допускает относительного линейного перемещения точек А и В по нормали к линии АВ и взаимного поворота узлов (сечений) в точках А и В (или взаимного поворота жёстких дисков в целом);
Рис.1.15
– связь 3-го типа – припайка (три ограничения на перемещения в месте наложения связи) – жёсткое соединение дисков (рис. 1.16), полностью устраняющее возможность любых (углового и линейных) относительных перемещений в точках А и В соединяемых дисков.
Рис.1.16
Сложные связи 2-го и 3-го типов формально могут рассматриваться как различные комбинации простых связей, обеспечивающие соединение дисков, кинематически эквивалентное соответствующей сложной связи (т.е. с такими же ограничениями на взаимные перемещения дисков). Например, цилиндрический шарнир (рис. 1.17, а) эквивалентен двум линейным связям 1-го типа, каждая из которых одним концом прикреплена к одному из дисков (D1 на рис. 1.17, б) в точках А и В, а другим – ко второму диску (D2) в общей точке С.
Рис.1.17
Поступательный шарнир (см. рис. 1.15) эквивалентен соединению дисков также двумя линейными связями – параллельными друг другу и ортогональными оси поступательного шарнира (рис.1.18, а).
Рис.1.18
На рис. 1.18, б – д показаны различные варианты изображения поступательных шарниров, удобные для использования в расчётных схемах стержневых систем в часто встречающихся случаях, когда оси соединяемых прямолинейных стержней образуют единую прямую, а криволинейные имеют общую касательную в месте соединения. На рис. 1.18, б, г изображены шарниры с осью, совпадающей с продольными осями прямых стержней или с касательной к оси криволинейных стержней – такие шарниры называются продольными поступательными шарнирами. Оси шарниров, показанных на рис. 1.18, в, д, направлены по нормали к осям соединяемых стержней – это поперечные поступательные шарниры.
Припайка (см. рис. 1.16) может быть заменена тремя линейными связями бесконечно малых размеров (рис. 1.19), оси которых не должны сходиться в одной точке или быть параллельными.
Рис.1.19
И наоборот, некоторые комбинации простых связей могут рассматриваться как соответствующие сложные связи. Так, соединение двух дисков двумя линейными связями (рис. 1.20) может быть отождествлено с цилиндрическим шарниром в точке С пересечения направлений осей связей АC' и BC'', так как эта точка является мгновенным взаимным центром вращения дисков D1 и D2. Однако нужно иметь в виду, что если бы в точке С был реальный цилиндрический шарнир, то при отсутствии других связей взаимный поворот дисков вокруг точки С был бы возможен на любой конечный угол, а не на бесконечно малый, как в случае мгновенного центра С, когда его положение изменяется с увеличением взаимного поворота дисков. Поэтому шарнир С, условно эквивалентный паре линейных связей, называется фиктивным (правильнее было бы использовать термин «условный шарнир»).
Рис.1.20
Аналогично пара параллельных линейных связей (рис. 1.21) кинематически эквивалентна фиктивному (условному) поступательному шарниру с осью, перпендикулярной осям связей АC' и BC''. Изображение этого шарнира не даёт никаких упрощений, но использование знания его свойств может быть полезным при выполнении кинематического анализа системы. Заметим, что соединения дисков, показанные на рис. 1.20 и 1.21, отличаются только взаимным расположением линейных связей – во втором случае точка пересечения направлений их осей удалена в бесконечность.
Рис.1.21
В выполненном выше изложении типологии связей плоских систем обсуждались их кинематические свойства. Для полного описания свойств некоторой связи служат её кинематическая и статическая характеристики, первая из которых формулирует ограничения, накладываемые связью на перемещения соединяемых ею объектов, а вторая определяет число и виды составляющих компонентов реакций связи. Согласно принципу двойственности в механике (взаимного соответствия друг другу статических и кинематических величин) каждому ограничению перемещений (кинематическому условию) соответствует статический фактор – реакция определённого вида (сила – если связь препятствует линейному перемещению, или момент – при ограничении углового перемещения).
Сводная информация о типовых связях плоских систем приведена в табл. 1, где показаны варианты изображения связей на расчётных схемах, а также даны их кинематические и статические характеристики. Если один из соединяемых дисков – «земля», то связь – внешняя (опорная); специальные упрощённые изображения даны только для внешней угловой связи и внешнего поступательного шарнира (подвижной защемляющей опоры), в остальных случаях никаких различий в обозначениях внешних и внутренних связей одного типа нет.
No comments:
Post a Comment